This page presents a selection of my publications ordered by topics. See the publications list for an exhaustive view.
Vision for microrobotics
High Resolution Vision-based Pose Estimation
S. Cuenat et al., “Digital holographic microscopy applied to 3D computer micro-vision by using deep neural networks,” Journal of the European Optical Society-Rapid Publications, vol. 20, no. 2, p. 31, 2024.
@article{Cuenat2024digital,
title = {Digital holographic microscopy applied to 3D computer micro-vision by using deep neural networks},
author = {Cuenat, St{\'e}phane and Carca{\~n}o, Jes{\'u}s E Brito and Ahmad, Belal and Sandoz, Patrick and Couturier, Rapha{\"e}l and Laurent, Guillaume J. and Jacquot, Maxime},
journal = {Journal of the European Optical Society-Rapid Publications},
volume = {20},
number = {2},
pages = {31},
year = {2024},
publisher = {EDP Sciences},
doi = {10.1051/jeos/2024032},
groups = {ACLI, High Resolution Vision-based Pose Estimation}
}
B. Ahmad, P. Sandoz, and G. J. Laurent, “6-DoF Motion Capture with Nanometric Resolutions over Millimetric Ranges Using a Pseudo-Periodic Encoded Pattern,” IEEE Transactions on Instrumentation and Measurement, 2024.
@article{Ahmad2024motion,
title = {6-DoF Motion Capture with Nanometric Resolutions over Millimetric Ranges Using a Pseudo-Periodic Encoded Pattern},
author = {Ahmad, Belal and Sandoz, Patrick and Laurent, Guillaume J.},
journal = {IEEE Transactions on Instrumentation and Measurement},
year = {2024},
publisher = {IEEE},
doi = {10.1109/TIM.2024.3523360},
groups = {ACLI, High Resolution Vision-based Pose Estimation}
}
S. Cuenat, J. E. B. Carcaño, P. Sandoz, R. Couturier, G. J. Laurent, and M. Jacquot, “Computer microvision-based precision motion measurement by digital holographic microscopy and deep transformer neural networks,” in Proc. of the SPIE OPTO, AI and Optical Data Sciences IV, 2023, vol. PC12438, p. PC124380N.
@inproceedings{Cuenat2023computer,
author = {Cuenat, Stéphane and Carcaño, Jesus E. B. and Sandoz, Patrick and Couturier, Raphaël and Laurent, Guillaume J. and Jacquot, Maxime},
title = {Computer microvision-based precision motion measurement by digital holographic microscopy and deep transformer neural networks},
volume = {PC12438},
booktitle = {Proc. of the SPIE OPTO, AI and Optical Data Sciences IV},
pages = {PC124380N},
year = {2023},
doi = {10.1117/12.2647737},
groups = {ACTI, High Resolution Vision-based Pose Estimation}
}
J. E. B. Carcaño et al., “Digital holographic microscopy applied to 3D computer microvision by using deep neural networks,” in Proc. of the EPJ Web of Conferences, 2023, vol. 287, p. 13011.
@inproceedings{Carcano2023digital,
title = {Digital holographic microscopy applied to 3D computer microvision by using deep neural networks},
author = {Carcaño, Jesus E. B. and Cuenat, Stéphane and Ahmad, Belal and Sandoz, Patrick and Couturier, Raphaël and Laurent, Guillaume J. and Jacquot, Maxime},
booktitle = {Proc. of the EPJ Web of Conferences},
volume = {287},
pages = {13011},
year = {2023},
doi = {10.1051/epjconf/202328713011},
url = {https://www.epj-conferences.org/articles/epjconf/pdf/2023/13/epjconf_eosam2023_13011.pdf},
groups = {ACTI, High Resolution Vision-based Pose Estimation}
}
S. Cuenat et al., “Fast autofocusing using tiny transformer networks for digital holographic microscopy,” Optics Express, vol. 30, no. 14, pp. 24730–24746, 2022.
@article{Cuenat2022fast,
author = {Cuenat, Stéphane and Andréoli, Louis and André, Antoine N. and Sandoz, Patrick and Laurent, Guillaume J. and Couturier, Raphaël and Jacquot, Maxime},
title = {Fast autofocusing using tiny transformer networks for digital holographic microscopy},
journal = {Optics Express},
year = {2022},
volume = {30},
number = {14},
pages = {24730-24746},
doi = {10.1364/OE.458948},
groups = {ACLI, High Resolution Vision-based Pose Estimation}
}
A. N. André, P. Sandoz, M. Jacquot, and G. J. Laurent, “Pose Measurement at Small Scale by Spectral Analysis of Periodic Patterns,” International Journal of Computer Vision, vol. 130, no. 6, pp. 1566–1582, 2022.
@article{Andre2022pose,
title = {Pose Measurement at Small Scale by Spectral Analysis of Periodic Patterns},
author = {André, Antoine N. and Sandoz, Patrick and Jacquot, Maxime and Laurent, Guillaume J.},
journal = {International Journal of Computer Vision},
pages = {1566-1582},
volume = {130},
number = {6},
year = {2022},
publisher = {Springer},
doi = {10.1007/s11263-022-01607-7},
groups = {ACLI, High Resolution Vision-based Pose Estimation}
}
L. Andréoli et al., “Extended autofocusing capabilities in digital holographic microscopy with transformer neural networks,” in Proc. of the SPIE Photonics Europe, Unconventional Optical Imaging III, 2022, p. PC1213616.
@inproceedings{Andreoli2022autofocusing,
title = {Extended autofocusing capabilities in digital holographic microscopy with transformer neural networks},
author = {Andréoli, Louis and Cuenat, Stéphane and André, Antoine N. and Sandoz, Patrick and Couturier, Raphaël and Laurent, Guillaume J. and Jacquot, Maxime},
booktitle = {Proc. of the SPIE Photonics Europe, Unconventional Optical Imaging III},
pages = {PC1213616},
doi = {10.1117/12.2621467},
year = {2022},
groups = {ACTI, High Resolution Vision-based Pose Estimation}
}
L. Andréoli et al., “Extended machine vision-control capabilities using digital holography and transformer neural networks,” in Proc. of the SPIE Photonics West, AI and Optical Data Sciences III, 2022, p. PC1201903.
@inproceedings{Andreoli2022machine,
title = {Extended machine vision-control capabilities using digital holography and transformer neural networks},
author = {Andréoli, Louis and Cuenat, Stéphane and André, Antoine N. and Sandoz, Patrick and Couturier, Raphaël and Laurent, Guillaume J. and Jacquot, Maxime},
booktitle = {Proc. of the SPIE Photonics West, AI and Optical Data Sciences III},
doi = {10.1117/12.2607116},
page = {PC1201903},
year = {2022},
groups = {ACTI, High Resolution Vision-based Pose Estimation}
}
A. N. André, P. Sandoz, M. Jacquot, and G. J. Laurent, “Robust, precise and scalable: A phase-encoded pattern for visual X, Y, Θpositioning,” in Proc. of the IEEE Int. Conf. on Manipulation, Automation and Robotics at Small Scales (MARSS), 2020, pp. 1–5.
@inproceedings{Andre2020scalable,
author = {André, Antoine N. and Sandoz, Patrick and Jacquot, Maxime and Laurent, Guillaume J.},
booktitle = {Proc. of the IEEE Int. Conf. on Manipulation, Automation and Robotics at Small Scales (MARSS)},
title = {Robust, precise and scalable: A phase-encoded pattern for visual X, Y, $\Theta$ positioning},
doi = {10.1109/MARSS49294.2020.9307842},
pages = {1-5},
groups = {ACTI, High Resolution Vision-based Pose Estimation},
year = {2020}
}
A. N. André, P. Sandoz, B. Mauzé, M. Jacquot, and G. J. Laurent, “Sensing One Nanometer over Ten Centimeters: A Micro-Encoded Target for Visual In-Plane Position Measurement,” IEEE/ASME Transactions on Mechatronics, vol. 25, no. 3, pp. 1193–1201, 2020.
@article{Andre2020sensing,
author = {André, Antoine N. and Sandoz, Patrick and Mauzé, Benjamin and Jacquot, Maxime and Laurent, Guillaume J.},
title = {Sensing One Nanometer over Ten Centimeters: A Micro-Encoded Target for Visual In-Plane Position Measurement},
doi = {10.1109/TMECH.2020.2965211},
issue = {3},
pages = {1193-1201},
volume = {25},
groups = {ACLI, High Resolution Vision-based Pose Estimation},
journal = {IEEE/ASME Transactions on Mechatronics},
year = {2020}
}
A. N. André, P. Sandoz, B. Mauzé, M. Jacquot, and G. J. Laurent, “Robust phase-based decoding for absolute (X, Y, Θ) positioning by vision,” IEEE Transactions on Instrumentation and Measurement, vol. 70, pp. 1–12, 2020.
@article{Andre2020robust,
author = {André, Antoine N. and Sandoz, Patrick and Mauzé, Benjamin and Jacquot, Maxime and Laurent, Guillaume J.},
title = {Robust phase-based decoding for absolute (X, Y, $\Theta$) positioning by vision},
doi = {10.1109/TIM.2020.3009353},
pages = {1-12},
volume = {70},
groups = {ACLI, High Resolution Vision-based Pose Estimation},
journal = {IEEE Transactions on Instrumentation and Measurement},
year = {2020}
}
B. Mauzé, R. Dahmouche, C. Clévy, P. Sandoz, F. Hennebelle, and G. J. Laurent, “Visual Measurements at Small Scales: Guidelines to Reduce Uncertainties down to a Few Nanometers,” in Proc. of the IEEE Int. Conf. on Manipulation, Automation and Robotics at Small Scales (MARSS), 2020, pp. 1–6.
@inproceedings{Mauze2020visual,
author = {Mauzé, Benjamin and Dahmouche, Redwan and Clévy, Cédric and Sandoz, Patrick and Hennebelle, François and Laurent, Guillaume J.},
booktitle = {Proc. of the IEEE Int. Conf. on Manipulation, Automation and Robotics at Small Scales (MARSS)},
title = {Visual Measurements at Small Scales: Guidelines to Reduce Uncertainties down to a Few Nanometers},
doi = {10.1109/MARSS49294.2020.9307854},
pages = {1-6},
groups = {ACTI, High Resolution Vision-based Pose Estimation},
year = {2020}
}
P. Sandoz et al., “Enlarging computer-vision sensing-capabilities using pseudo-periodic patterns,” in Latin America Optics and Photonics Conference (Optical Society of America), 2018.
@inproceedings{Sandoz2018enlarging,
author = {Sandoz, Patrick and Jacquot, Maxime and Guelpa, Valérian and Galeano Zea, July A. and Gaiffe, Emilie and Asmad Vergara, Miguel and Clévy, Cédric and Laurent, Guillaume J.},
booktitle = {Latin America Optics and Photonics Conference (Optical Society of America)},
title = {Enlarging computer-vision sensing-capabilities using pseudo-periodic patterns},
doi = {10.1364/LAOP.2018.W4B.4},
publisher = {Optical Society of America},
groups = {ACTI, High Resolution Vision-based Pose Estimation},
journal = {Latin America Optics and Photonics Conference},
year = {2018}
}
M. Asmad Vergara, M. Jacquot, G. J. Laurent, and P. Sandoz, “Digital Holography as Computer Vision Position Sensor with an Extended Range of Working Distances,” Sensors, vol. 18, no. 7, 2018.
@article{AsmadVergara2018digital,
author = {Asmad Vergara, Miguel and Jacquot, Maxime and Laurent, Guillaume J. and Sandoz, Patrick},
title = {Digital Holography as Computer Vision Position Sensor with an Extended Range of Working Distances},
doi = {10.3390/s18072005},
number = {7},
volume = {18},
groups = {ACLI, High Resolution Vision-based Pose Estimation},
journal = {Sensors},
publisher = {MDPI},
year = {2018}
}
V. Guelpa et al., “3D-printed vision-based micro-force sensor dedicated to in situ SEM measurements,” in Proc. of the IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, 2017, pp. 424–429.
@inproceedings{Guelpa2017printed,
author = {Guelpa, V. and Prax, J. S. and Vitry, Y. and Lehmann, O. and Dehaeck, S. and Sandoz, P. and Clévy, C. and Le Fort-Piat, N. and Lambert, P. and Laurent, G. J.},
booktitle = {Proc. of the IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics},
title = {3D-printed vision-based micro-force sensor dedicated to in situ SEM measurements},
doi = {10.1109/AIM.2017.8014054},
pages = {424--429},
groups = {ACTI, High Resolution Vision-based Pose Estimation},
year = {2017}
}
V. Guelpa, P. Sandoz, M. Asmad Vergara, C. Clévy, N. Le Fort-Piat, and G. J. Laurent, “2D visual micro-position measurement based on intertwined twin-scale patterns,” Sensors and Actuators A: Physical, vol. 248, pp. 272–280, 2016.
@article{Guelpa2016visual,
author = {Guelpa, Valérian and Sandoz, Patrick and Asmad Vergara, Miguel and Clévy, Cédric and Le Fort-Piat, Nadine and Laurent, Guillaume J.},
title = {{2D} visual micro-position measurement based on intertwined twin-scale patterns},
doi = {10.1016/j.sna.2016.08.002},
pages = {272--280},
volume = {248},
groups = {ACLI, High Resolution Vision-based Pose Estimation},
journal = {Sensors and Actuators A: Physical},
year = {2016}
}
V. Guelpa, P. Sandoz, C. Clévy, N. Le Fort-Piat, and G. J. Laurent, “Pattern-based vision for microrobotic manipulators calibration and servoing,” in International Conference on Ubiquitous Robots and Ambient Intelligence, 2016, pp. 308–310.
@inproceedings{Guelpa2016pattern,
author = {Guelpa, V. and Sandoz, P. and Clévy, C. and Le Fort-Piat, N. and Laurent, G. J.},
booktitle = {International Conference on Ubiquitous Robots and Ambient Intelligence},
title = {Pattern-based vision for microrobotic manipulators calibration and servoing},
doi = {10.1109/URAI.2016.7734048},
pages = {308--310},
groups = {INV, ACTI, High Resolution Vision-based Pose Estimation},
month = aug,
year = {2016}
}
V. Guelpa, G. J. Laurent, B. Tamadazte, P. Sandoz, N. Le Fort-Piat, and C. Clévy, “Single frequency-based visual servoing for microrobotics applications,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2016, pp. 4274–4279.
@inproceedings{Guelpa2016single,
author = {Guelpa, V. and Laurent, G. J. and Tamadazte, B. and Sandoz, P. and Le Fort-Piat, N. and Clévy, C.},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Single frequency-based visual servoing for microrobotics applications},
doi = {10.1109/IROS.2016.7759629},
pages = {4274--4279},
groups = {ACTI, High Resolution Vision-based Pose Estimation},
month = oct,
year = {2016}
}
M. Asmad Vergara, M. Jacquot, G. J. Laurent, and P. Sandoz, “In-plane position and orientation measurement of a mobile target by digital holography,” in Proc. of the Latin America Optics and Photonics Conference (Optical Society of America), 2016.
@inproceedings{AsmadVergara2016inplane,
author = {Asmad Vergara, M. and Jacquot, M. and Laurent, G. J. and Sandoz, P.},
booktitle = {Proc. of the Latin America Optics and Photonics Conference (Optical Society of America)},
title = {In-plane position and orientation measurement of a mobile target by digital holography},
doi = {10.1364/LAOP.2016.LTh3C.3},
note = {paper LTh3C.3},
groups = {ACTI, High Resolution Vision-based Pose Estimation},
year = {2016}
}
V. Guelpa, G. J. Laurent, P. Sandoz, J. Galeano Zea, and C. Clévy, “Subpixelic Measurement of Large 1D Displacements: Principle, Processing Algorithms, Performances and Software,” Sensors, vol. 14, no. 3, pp. 5056–5073, 2014.
@article{Guelpa2014subpixelic,
author = {Guelpa, Valérian and Laurent, Guillaume J. and Sandoz, Patrick and Galeano Zea, July and Clévy, Cédric},
title = {Subpixelic Measurement of Large 1D Displacements: Principle, Processing Algorithms, Performances and Software},
doi = {10.3390/s140305056},
number = {3},
pages = {5056--5073},
volume = {14},
groups = {ACLI, High Resolution Vision-based Pose Estimation},
journal = {Sensors},
year = {2014}
}
J. Galeano Zea, P. Sandoz, G. J. Laurent, L. Lopes Lemos, and C. Clévy, “Twin-scale Vernier Micro-pattern for Visual Measurement of 1-D in-plane Absolute Displacements with Increased Range-to-Resolution Ratio,” International Journal of Optomechatronics, vol. 7, no. 3, pp. 222–234, 2013.
@article{Galeano2013twin,
author = {Galeano Zea, July and Sandoz, Patrick and Laurent, Guillaume J. and Lopes Lemos, Lucas and Clévy, Cédric},
title = {Twin-scale Vernier Micro-pattern for Visual Measurement of 1-D in-plane Absolute Displacements with Increased Range-to-Resolution Ratio},
doi = {10.1080/15599612.2013.808493},
number = {3},
pages = {222--234},
volume = {7},
groups = {ACLI, High Resolution Vision-based Pose Estimation},
journal = {International Journal of Optomechatronics},
year = {2013}
}
Vision-based Microrobot Control
A. N. André et al., “Automating Robotic Micro-Assembly of Fluidic Chips and Single Fiber Compression Tests Based-on ΘVisual Measurement With High-Precision Fiducial Markers,” IEEE Transactions on Automation Science and Engineering, vol. 21, no. 1, pp. 353–366, 2022.
@article{Andre2022automating,
author = {André, Antoine N. and Lehmann, Olivier and Govilas, Jason and Laurent, Guillaume J. and Saadana, Hamdi and Sandoz, Patrick and Gauthier, Vladimir and Lefevre, Alexis and Bolopion, Aude and Agnus, Joël and Placet, Vincent and Clévy, Cédric},
journal = {IEEE Transactions on Automation Science and Engineering},
title = {Automating Robotic Micro-Assembly of Fluidic Chips and Single Fiber Compression Tests Based-on $\Theta$ Visual Measurement With High-Precision Fiducial Markers},
year = {2022},
volume = {21},
number = {1},
pages = {353-366},
doi = {10.1109/TASE.2022.3218686},
groups = {ACLI, Vision-based Microrobot Control}
}
M. Ourak, B. Tamadazte, G. J. Laurent, and N. Andreff, “Geometric Calibration of an OCT Imaging System,” in Proc. of the IEEE Int. Conf. on Robotics and Automation, 2018, pp. 3993–3999.
@inproceedings{Ourak2018geometric,
author = {Ourak, Mouloud and Tamadazte, Brahim and Laurent, Guillaume J. and Andreff, Nicolas},
booktitle = {Proc. of the IEEE Int. Conf. on Robotics and Automation},
title = {Geometric Calibration of an OCT Imaging System},
doi = {10.1109/ICRA.2018.8463171},
pages = {3993--3999},
groups = {ACTI, Vision-based Microrobot Control},
year = {2018}
}
Y. Baran, K. Rabenorosoa, G. J. Laurent, P. Rougeot, N. Andreff, and B. Tamadazte, “Preliminary Results on OCT-based Position Control of a Concentric Tube Robot,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2017, pp. 3000–3005.
@inproceedings{Baran2017preliminary,
author = {Baran, Y. and Rabenorosoa, K. and Laurent, G. J. and Rougeot, P. and Andreff, N. and Tamadazte, B.},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Preliminary Results on OCT-based Position Control of a Concentric Tube Robot},
doi = {10.1109/IROS.2017.8206137},
pages = {3000--3005},
groups = {ACTI, Vision-based Microrobot Control},
year = {2017}
}
M. Ourak, A. De Simone, B. Tamadazte, G. J. Laurent, A. Menciassi, and N. Andreff, “Automated in-plane OCT-probe positioning towards repetitive optical biopsies,” in Proc. of the IEEE Int. Conf. on Robotics and Automation, 2016, pp. 4186–4191.
@inproceedings{Ourak2016automated,
author = {Ourak, M. and De Simone, A. and Tamadazte, B. and Laurent, G. J. and Menciassi, A. and Andreff, N.},
booktitle = {Proc. of the IEEE Int. Conf. on Robotics and Automation},
title = {Automated in-plane {OCT}-probe positioning towards repetitive optical biopsies},
doi = {10.1109/ICRA.2016.7487612},
pages = {4186--4191},
groups = {ACTI, Vision-based Microrobot Control},
month = may,
year = {2016}
}
A. Kudryavtsev, G. J. Laurent, C. Clévy, B. Tamadazte, and P. Lutz, “Analysis of CAD Model-based Visual Tracking for Microassembly using a New Block Set for MATLAB/Simulink.,” International Journal of Optomechatronics, vol. 9, no. 4, pp. 295–309, 2015.
@article{Kudryavtsev2015analysis,
author = {Kudryavtsev, Andrey and Laurent, Guillaume J. and Clévy, Cédric and Tamadazte, Brahim and Lutz, Philippe},
title = {Analysis of {CAD} Model-based Visual Tracking for Microassembly using a New Block Set for {MATLAB/Simulink}.},
doi = {10.1080/15599612.2015.1059532},
number = {4},
pages = {295--309},
volume = {9},
groups = {ACLI, Vision-based Microrobot Control},
journal = {International Journal of Optomechatronics},
year = {2015}
}
I. A. Ivan, M. Ardeleanu, and G. J. Laurent, “High Dynamics and Precision Optical Measurement Using a Position Sensitive Detector (PSD) in Reflection-Mode: Application to 2D Object Tracking over a Smart Surface,” Sensors, vol. 12, no. 12, pp. 16771–16784, 2012.
@article{Ivan2012high,
author = {Ivan, Ioan Alexandru and Ardeleanu, Mihai and Laurent, Guillaume J.},
title = {High Dynamics and Precision Optical Measurement Using a Position Sensitive Detector (PSD) in Reflection-Mode: Application to 2D Object Tracking over a Smart Surface},
doi = {10.3390/s121216771},
number = {12},
pages = {16771--16784},
volume = {12},
groups = {ACLI, Vision-based Microrobot Control},
journal = {Sensors},
year = {2012}
}
Vision-based Force Measurement
M. Diezinger, B. Tamadazte, and G. J. Laurent, “TriRod: A 3-RF Continuum Parallel Robot for Shape-Based Load Estimation,” IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 7265–7272, 2023.
@article{Diezinger2023trirod,
author = {Diezinger, Matyas and Tamadazte, Brahim and Laurent, Guillaume J.},
journal = {IEEE Robotics and Automation Letters},
title = {TriRod: A {3-RF} Continuum Parallel Robot for Shape-Based Load Estimation},
year = {2023},
volume = {8},
number = {11},
pages = {7265-7272},
doi = {10.1109/LRA.2023.3316076},
groups = {ACLI, Vision-based Force Measurement}
}
M. A. Diezinger, B. Tamadazte, and G. J. Laurent, “3D Curvature-Based Tip Load Estimation for Continuum Robots,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10526–10533, 2022.
@article{Diezinger2022curvature,
author = {Diezinger, Matyas A. and Tamadazte, Brahim and Laurent, Guillaume J.},
journal = {IEEE Robotics and Automation Letters},
title = {3D Curvature-Based Tip Load Estimation for Continuum Robots},
year = {2022},
volume = {7},
number = {4},
pages = {10526-10533},
doi = {10.1109/LRA.2022.3194680},
groups = {ACLI, Vision-based Force Measurement}
}
B. Tiwari et al., “A High Range-to-Resolution Multiaxis \muForce and Torque Sensing Platform,” IEEE/ASME Transactions on Mechatronics, vol. 26, no. 4, pp. 1837–1845, 2021.
@article{Tiwari2021high,
author = {Tiwari, Bhawnath and Blot, Mélissa and Laurent, Guillaume J. and Agnus, Joël and Sandoz, Patrick and Lutz, Philippe and Clévy, Cédric},
journal = {IEEE/ASME Transactions on Mechatronics},
title = {A High Range-to-Resolution Multiaxis $\mu$Force and Torque Sensing Platform},
year = {2021},
volume = {26},
number = {4},
pages = {1837-1845},
doi = {10.1109/TMECH.2021.3071444},
groups = {ACLI, Vision-based Force Measurement}
}
V. Placet et al., “Transverse compressive properties of natural fibers determined using micro mechatronic systems and 2D full-field measurements,” in Materials Today: Proceedings of the 4th Int. Conf. on Natural Fibers (ICNF 2019), Porto, Portugal, 2020.
@inproceedings{Placet2020transverse,
author = {Placet, Vincent and Blot, Mélissa and Weemaes, Tine and Bernollin, Hugo and Laurent, Guillaume and Amiot, Fabien and Clévy, Cédric and Beaugrand, Johnny},
booktitle = {Materials Today: Proceedings of the 4th Int. Conf. on Natural Fibers (ICNF 2019)},
title = {Transverse compressive properties of natural fibers determined using micro mechatronic systems and 2D full-field measurements},
doi = {10.1016/j.matpr.2020.01.383},
address = {Porto, Portugal},
groups = {ACTI, Vision-based Force Measurement},
year = {2020}
}
V. Guelpa, G. J. Laurent, P. Sandoz, and C. Clévy, “Vision-Based Microforce Measurement with a Large Range-to-Resolution Ratio using a Twin-Scale Pattern,” IEEE/ASME Transactions on Mechatronics, vol. 20, no. 6, pp. 3148–3156, 2015.
@article{Guelpa2015vision,
author = {Guelpa, Valérian and Laurent, Guillaume J. and Sandoz, Patrick and Clévy, Cédric},
title = {Vision-Based Microforce Measurement with a Large Range-to-Resolution Ratio using a Twin-Scale Pattern},
doi = {10.1109/TMECH.2015.2407053},
number = {6},
pages = {3148--3156},
volume = {20},
groups = {ACLI, Vision-based Force Measurement},
journal = {IEEE/ASME Transactions on Mechatronics},
year = {2015}
}
Microrobotics
Continuum Microrobots
C. Nwafor, G. J. Laurent, and K. Rabenorosoa, “Miniaturized Continuum Robot Made of Glass for Biomedical Applications,” in Conference on New Technologies for Computer and Robot Assisted Surgery, Paris, France, 2023.
@conference{Nwafor2023miniaturized,
author = {Nwafor, Chibundo and Laurent, Guillaume J. and Rabenorosoa, Kanty},
booktitle = {Conference on New Technologies for Computer and Robot Assisted Surgery},
title = {Miniaturized Continuum Robot Made of Glass for Biomedical Applications},
year = {2023},
address = {Paris, France},
month = {11-13 September},
note = {Best Presentation Paper Award},
groups = {COMI, Continuum Microrobots}
}
C. Nwafor, G. J. Laurent, and K. Rabenorosoa, “Miniature Parallel Continuum Robot Made of Glass: Analysis, Design, and Proof-of-Concept,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 4, pp. 2038–2046, 2023.
@article{Nwafor2023miniature,
author = {Nwafor, Chibundo and Laurent, Guillaume J. and Rabenorosoa, Kanty},
journal = {IEEE/ASME Transactions on Mechatronics},
title = {Miniature Parallel Continuum Robot Made of Glass: Analysis, Design, and Proof-of-Concept},
year = {2023},
volume = {28},
number = {4},
pages = {2038-2046},
doi = {10.1109/TMECH.2023.3276230},
groups = {ACLI, Continuum Microrobots}
}
C. J. Nwafor, C. Girerd, G. J. Laurent, T. K. Morimoto, and K. Rabenorosoa, “Design and Fabrication of Concentric Tube Robots: A Survey,” IEEE Transactions on Robotics, vol. 39, no. 4, pp. 2510–2528, 2023.
@article{Nwafor2023design,
author = {Nwafor, Chibundo J. and Girerd, Cédric and Laurent, Guillaume J. and Morimoto, Tania K. and Rabenorosoa, Kanty},
journal = {IEEE Transactions on Robotics},
title = {Design and Fabrication of Concentric Tube Robots: A Survey},
year = {2023},
volume = {39},
number = {4},
pages = {2510-2528},
doi = {10.1109/TRO.2023.3255512},
groups = {ACLI, Continuum Microrobots}
}
C. J. Nwafor, G. J. Laurent, P. Rougeot, and K. Rabenorosoa, “The Caturo: A Submillimeter Diameter Glass Concentric Tube Robot with High Curvature,” Advanced Intelligent Systems, vol. 5, no. 2, p. 2200308, 2023.
@article{Nwafor2023caturo,
author = {Nwafor, Chibundo J. and Laurent, Guillaume J. and Rougeot, Patrick and Rabenorosoa, Kanty},
title = {The Caturo: A Submillimeter Diameter Glass Concentric Tube Robot with High Curvature},
journal = {Advanced Intelligent Systems},
volume = {5},
number = {2},
pages = {2200308},
doi = {https://doi.org/10.1002/aisy.202200308},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1002/aisy.202200308},
year = {2023},
groups = {ACLI, Continuum Microrobots}
}
O. F. Gallardo, B. Mauzé, R. Dahmouche, C. Duriez, and G. J. Laurent, “Turning an Articulated 3-PPSR Manipulator into a Parallel Continuum Robot,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2021, pp. 4955–4960.
@inproceedings{Gallardo2021turning,
author = {Gallardo, Oscar F. and Mauzé, Benjamin and Dahmouche, Redwan and Duriez, Christian and Laurent, Guillaume J.},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Turning an Articulated 3-{PPSR} Manipulator into a Parallel Continuum Robot},
year = {2021},
pages = {4955-4960},
doi = {10.1109/IROS51168.2021.9636596},
groups = {ACTI, Continuum Microrobots}
}
B. Mauzé, G. J. Laurent, R. Dahmouche, and C. Clévy, “Micrometer Positioning Accuracy With a Planar Parallel Continuum Robot,” Frontiers in Robotics and AI, vol. 8, pp. 1–13, 2021.
@article{Mauze2021micrometer,
author = {Mauzé, Benjamin and Laurent, Guillaume J. and Dahmouche, Redwan and Clévy, Cédric},
title = {Micrometer Positioning Accuracy With a Planar Parallel Continuum Robot},
journal = {Frontiers in Robotics and AI},
volume = {8},
pages = {1-13},
year = {2021},
url = {https://www.frontiersin.org/article/10.3389/frobt.2021.706070},
doi = {10.3389/frobt.2021.706070},
groups = {ACLI, Continuum Microrobots}
}
B. Mauzé et al., “Nanometer Precision With a Planar Parallel Continuum Robot,” IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 3806–3813, 2020.
@article{Mauze2020nanometer,
author = {Mauzé, Benjamin and Dahmouche, Redwan and Laurent, Guillaume J. and André, Antoine N. and Rougeot, Patrick and Sandoz, Patrick and Clévy, Cédric},
title = {Nanometer Precision With a Planar Parallel Continuum Robot},
doi = {10.1109/LRA.2020.2982360},
number = {3},
pages = {3806 - 3813},
volume = {5},
groups = {ACLI, Continuum Microrobots},
journal = {IEEE Robotics and Automation Letters},
year = {2020}
}
Parallel Microrobots
M. Leveziel, G. J. Laurent, M. Gauthier, and R. Dahmouche, “Kinematic Modeling of a Miniaturized Configurable Parallel Robot with Soft Joints for Real-Time Control,” in 2024 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2024, pp. 1–6.
@inproceedings{Leveziel2024kinematic,
title = {Kinematic Modeling of a Miniaturized Configurable Parallel Robot with Soft Joints for Real-Time Control},
author = {Leveziel, Maxence and Laurent, Guillaume J. and Gauthier, Michael and Dahmouche, Redwan},
booktitle = {2024 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
pages = {1--6},
year = {2024},
organization = {IEEE},
doi = {10.1109/MARSS61851.2024.10612700},
note = {Nominated for Best Conference Paper Award},
groups = {ACTI, Parallel Microrobots}
}
M. Leveziel, W. Haouas, G. J. Laurent, M. Gauthier, and R. Dahmouche, “MiGriBot: A miniature parallel robot with integrated gripping for high-throughput micromanipulation,” Science Robotics, vol. 7, no. 69, p. eabn4292, 2022.
@article{Leveziel2022migribot,
author = {Leveziel, Maxence and Haouas, Wissem and Laurent, Guillaume J. and Gauthier, Michaël and Dahmouche, Redwan},
title = {MiGriBot: A miniature parallel robot with integrated gripping for high-throughput micromanipulation},
journal = {Science Robotics},
volume = {7},
number = {69},
pages = {eabn4292},
year = {2022},
doi = {10.1126/scirobotics.abn4292},
url = {https://www.science.org/doi/reader/10.1126/scirobotics.abn4292},
groups = {ACLI, Parallel Microrobots}
}
M. Leveziel, G. J. Laurent, W. Haouas, M. Gauthier, and R. Dahmouche, “A 4-DoF parallel robot with a built-in gripper for waste sorting,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9834–9841, 2022.
@article{Leveziel2022parallel,
title = {A 4-DoF parallel robot with a built-in gripper for waste sorting},
author = {Leveziel, Maxence and Laurent, Guillaume J. and Haouas, Wissem and Gauthier, Michael and Dahmouche, Redwan},
journal = {IEEE Robotics and Automation Letters},
volume = {7},
number = {4},
pages = {9834--9841},
year = {2022},
doi = {10.1109/LRA.2022.3192582},
groups = {ACLI, Parallel Microrobots}
}
W. Haouas, G. J. Laurent, S. Thibaud, and R. Dahmouche, “Kinematics, Design and Experimental Validation of a Novel Parallel Robot for Two-Fingered Dexterous Manipulation,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2019, pp. 6763–6768.
@inproceedings{Haouas2019kinematics,
author = {Haouas, Wissem and Laurent, Guillaume J. and Thibaud, Sébastien and Dahmouche, Redwan},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Kinematics, Design and Experimental Validation of a Novel Parallel Robot for Two-Fingered Dexterous Manipulation},
doi = {10.1109/IROS40897.2019.8968570},
pages = {6763-6768},
groups = {ACTI, Parallel Microrobots},
year = {2019}
}
W. Haouas, R. Dahmouche, N. Le Fort-Piat, and G. J. Laurent, “A New Seven Degrees-of-Freedom Parallel Robot With a Foldable Platform,” Journal of Mechanisms and Robotics, vol. 10, no. 4, 2018.
@article{Haouas2018new,
author = {Haouas, Wissem and Dahmouche, Redwan and Le Fort-Piat, Nadine and Laurent, Guillaume J.},
title = {A New Seven Degrees-of-Freedom Parallel Robot With a Foldable Platform},
doi = {10.1115/1.4039693},
number = {4},
volume = {10},
groups = {ACLI, Parallel Microrobots},
journal = {Journal of Mechanisms and Robotics},
publisher = {ASME},
year = {2018}
}
W. Haouas, R. Dahmouche, and G. J. Laurent, “Analysis of an Integrated 4-DoF Parallel Wrist for Dexterous Gripping,” in Proc. of the IEEE Int. Conf. on Automation Science and Engineering, 2018, pp. 1448–1453.
@inproceedings{Haouas2018analysis,
author = {Haouas, Wissem and Dahmouche, Redwan and Laurent, Guillaume J.},
booktitle = {Proc. of the IEEE Int. Conf. on Automation Science and Engineering},
title = {Analysis of an Integrated 4-DoF Parallel Wrist for Dexterous Gripping},
doi = {10.1109/COASE.2018.8560701},
pages = {1448--1453},
groups = {ACTI, Parallel Microrobots},
year = {2018}
}
G. Laurent, R. Dahmouche, W. Haouas, and N. Piat, “Parallel robotic wrist with four degrees of freedom,” no. WO2018/065734, Apr. 2018.
@article{Laurent2018parallel,
author = {Laurent, Guillaume and Dahmouche, Redwan and Haouas, Wissem and Piat, Nadine},
date = {2018-04-12},
title = {Parallel robotic wrist with four degrees of freedom},
number = {WO2018/065734},
url = {https://patents.google.com/patent/WO2018065734A1/en},
groups = {BRE, Parallel Microrobots},
nationality = {French},
year = {2018},
yearfiled = {2016}
}
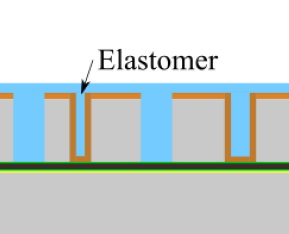
W. Haouas, R. Dahmouche, J. Agnus, N. Le Fort-Piat, and G. J. Laurent, “New integrated silicon-PDMS process for compliant micro-mechanisms,” Journal of Micromechanics and Microengineering, vol. 27, no. 12, 2017.
@article{Haouas2017new,
author = {Haouas, Wissem and Dahmouche, Redwan and Agnus, Joël and Le Fort-Piat, Nadine and Laurent, Guillaume J.},
title = {New integrated silicon-PDMS process for compliant micro-mechanisms},
doi = {10.1088/1361-6439/aa858b},
number = {12},
volume = {27},
groups = {ACLI, Parallel Microrobots},
journal = {Journal of Micromechanics and Microengineering},
year = {2017}
}
W. Haouas, R. Dahmouche, N. Le Fort-Piat, and G. J. Laurent, “4-DoF spherical parallel wrist with embedded grasping capability for minimally invasive surgery,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2016, pp. 2363–2368.
@inproceedings{Haouas2016spherical,
author = {Haouas, W. and Dahmouche, R. and Le Fort-Piat, N. and Laurent, G. J.},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {{4-DoF} spherical parallel wrist with embedded grasping capability for minimally invasive surgery},
doi = {10.1109/IROS.2016.7759368},
pages = {2363--2368},
groups = {ACTI, Parallel Microrobots},
month = oct,
year = {2016}
}
Micromanipulation and Microassembly
C. Clévy et al., “In-situ Versatile Characterization of Carbon NanoTubes using Nanorobotics,” in Proc. of the IEEE Int. Conf. on Manipulation, Automation and Robotics at Small Scales (MARSS), 2019, pp. 1–6.
@inproceedings{Clevy2019insitu,
author = {Clévy, Cédric and Sauvet, Bruno and Rauch, Jean-Yves and Lehmann, Olivier and Marionnet, François and Lutz, Philippe and Beccacece, Lorenzo and Xavier, Stéphane and Aubry, Raphael and Ziaei, Afshin and Prévot, Claude and Laurent, Guillaume J.},
booktitle = {Proc. of the IEEE Int. Conf. on Manipulation, Automation and Robotics at Small Scales (MARSS)},
title = {In-situ Versatile Characterization of Carbon NanoTubes using Nanorobotics},
doi = {10.1109/MARSS.2019.8860970},
pages = {1 - 6},
groups = {ACTI, Micromanipulation and Microassembly},
year = {2019}
}
B. Komati et al., “Automated robotic microassembly of flexible optical components,” in Proc. of the IEEE International Symposium on Assembly and Manufacturing (ISAM), 2016, pp. 93–98.
@inproceedings{Komati2016automated,
author = {Komati, B. and Kudryavtsev, A. and Clévy, C. and Laurent, G. and Tamadazte, B. and Agnus, J. and Lutz, P.},
booktitle = {Proc. of the IEEE International Symposium on Assembly and Manufacturing (ISAM)},
title = {Automated robotic microassembly of flexible optical components},
doi = {10.1109/ISAM.2016.7750721},
pages = {93--98},
groups = {ACTI, Micromanipulation and Microassembly},
month = aug,
year = {2016}
}
A. V. Kudryavtsev, G. J. Laurent, C. Clévy, B. Tamadazte, and P. Lutz, “Stereovision-based control for automated MOEMS assembly,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2015, pp. 1391–1396.
@inproceedings{Kudryavtsev2015stereovision,
author = {Kudryavtsev, Andrey V. and Laurent, Guillaume J. and Clévy, Cédric and Tamadazte, Brahim and Lutz, Philippe},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Stereovision-based control for automated {MOEMS} assembly},
doi = {10.1109/IROS.2015.7353549},
pages = {1391--1396},
groups = {ACTI, Micromanipulation and Microassembly},
month = sep,
year = {2015}
}
Microrobots Calibration
N. Tan, C. Clévy, G. J. Laurent, and N. Chaillet, “Compressive Sensing-Based Metrology for Micropositioning Stages Characterization,” IEEE Robotics and Automation Letters, vol. 1, no. 2, pp. 638–645, 2016.
@article{Tan2016compressive,
author = {Tan, Ning and Clévy, Cédric and Laurent, Guillaume J. and Chaillet, Nicolas},
title = {Compressive Sensing-Based Metrology for Micropositioning Stages Characterization},
doi = {10.1109/LRA.2016.2523550},
number = {2},
pages = {638--645},
volume = {1},
groups = {ACLI, Microrobots Calibration},
journal = {IEEE Robotics and Automation Letters},
year = {2016}
}
N. Tan, C. Clévy, G. J. Laurent, P. Sandoz, and N. Chaillet, “Accuracy Quantification and Improvement of Serial Micropositioning Robots for In-Plane Motions,” IEEE Transactions on Robotics, vol. 31, no. 6, pp. 1497–1507, Dec. 2015.
@article{Tan2015accuracy,
author = {Tan, Ning and Clévy, Cédric and Laurent, Guillaume J. and Sandoz, Patrick and Chaillet, Nicolas},
title = {Accuracy Quantification and Improvement of Serial Micropositioning Robots for In-Plane Motions},
doi = {10.1109/TRO.2015.2498301},
number = {6},
pages = {1497--1507},
volume = {31},
groups = {ACLI, Microrobots Calibration},
journal = {IEEE Transactions on Robotics},
month = dec,
year = {2015}
}
N. Tan, C. Clévy, G. J. Laurent, P. Sandoz, and N. Chaillet, “Characterization and Compensation of XY Micropositioning Robots using Vision and Pseudo-Periodic Encoded Patterns,” in Proc. of the IEEE Int. Conf. on Robotics and Automation, Hong Kong, China, 2014, pp. 2819–2824.
@inproceedings{Tan2014characterization,
author = {Tan, Ning and Clévy, Cédric and Laurent, Guillaume J. and Sandoz, Patrick and Chaillet, Nicolas},
booktitle = {Proc. of the IEEE Int. Conf. on Robotics and Automation},
title = {Characterization and Compensation of {XY} Micropositioning Robots using Vision and Pseudo-Periodic Encoded Patterns},
doi = {10.1109/ICRA.2014.6907263},
pages = {2819--2824},
address = {Hong Kong, China},
groups = {ACTI, Microrobots Calibration},
year = {2014}
}
N. Tan, C. Clévy, G. J. Laurent, and N. Chaillet, “Calibration and Validation of XYT Micropositioners with Vision,” in Proc. of the IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, 2012, pp. 256–261.
@inproceedings{Tan2012calibration,
author = {Tan, Ning and Clévy, Cédric and Laurent, Guillaume J. and Chaillet, Nicolas},
booktitle = {Proc. of the IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics},
title = {Calibration and Validation of {XYT} Micropositioners with Vision},
doi = {10.1109/AIM.2012.6266031},
pages = {256--261},
groups = {ACTI, Microrobots Calibration},
year = {2012}
}
Untethered and Mobile Microrobots
B. Ahmad, M. Gauthier, G. J. Laurent, and A. Bolopion, “Mobile Microrobots for In Vitro Biomedical Applications: A Survey,” IEEE Transactions on Robotics, pp. 1–18, 2021.
@article{Ahmad2021mobile,
author = {Ahmad, Belal and Gauthier, Michaël and Laurent, Guillaume J. and Bolopion, Aude},
journal = {IEEE Transactions on Robotics},
title = {Mobile Microrobots for In Vitro Biomedical Applications: A Survey},
year = {2021},
volume = {},
number = {},
pages = {1-18},
doi = {10.1109/TRO.2021.3085245},
groups = {ACLI, Untethered Microrobots}
}
B. Piranda, G. J. Laurent, J. Bourgeois, C. Clévy, S. Möbes, and N. Le Fort-Piat, “A new concept of planar self-reconfigurable modular robot for conveying microparts,” IFAC Mechatronics, vol. 23, no. 7, pp. 906–915, 2013.
@article{Piranda2013new,
author = {Piranda, Benoît and Laurent, Guillaume J. and Bourgeois, Julien and Clévy, Cédric and Möbes, Sebastian and Le Fort-Piat, Nadine},
title = {A new concept of planar self-reconfigurable modular robot for conveying microparts},
doi = {10.1016/j.mechatronics.2013.08.009},
number = {7},
pages = {906--915},
volume = {23},
groups = {ACLI, Untethered Microrobots},
journal = {IFAC Mechatronics},
year = {2013}
}
S. Möbes, B. Piranda, G. J. Laurent, J. Bourgeois, C. Clévy, and N. Le Fort-Piat, “Toward a 2D Modular and Self-Reconfigurable Robot for Conveying Microparts,” in Proc. of the IEEE dMEMS Workshop on Design, Control and Software Implementation for Distributed MEMS, 2012, pp. 7–13.
@inproceedings{Moebes2012toward,
author = {Möbes, Sebastian and Piranda, Benoît and Laurent, Guillaume J. and Bourgeois, Julien and Clévy, Cédric and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE dMEMS Workshop on Design, Control and Software Implementation for Distributed MEMS},
title = {Toward a {2D} Modular and Self-Reconfigurable Robot for Conveying Microparts},
doi = {10.1109/dMEMS.2012.20},
pages = {7--13},
publisher = {IEEE CPS},
groups = {ACTI, Untethered Microrobots},
year = {2012}
}
G. Laurent and E. Piat, “Efficiency of Swimming Microrobots using Ionic Polymer Metal Composite Actuators,” in Proc. of the IEEE Int. Conf. on Robotics and Automation, Seoul, Korea, 2001, pp. 3914–3919.
@inproceedings{Laurent2001efficiency,
author = {Laurent, Guillaume and Piat, Emmanuel},
booktitle = {Proc. of the IEEE Int. Conf. on Robotics and Automation},
title = {Efficiency of Swimming Microrobots using Ionic Polymer Metal Composite Actuators},
doi = {10.1109/ROBOT.2001.933227},
pages = {3914--3919},
address = {Seoul, Korea},
groups = {ACTI, Untethered Microrobots},
month = may,
year = {2001}
}
Distributed Manipulation with Air Flow
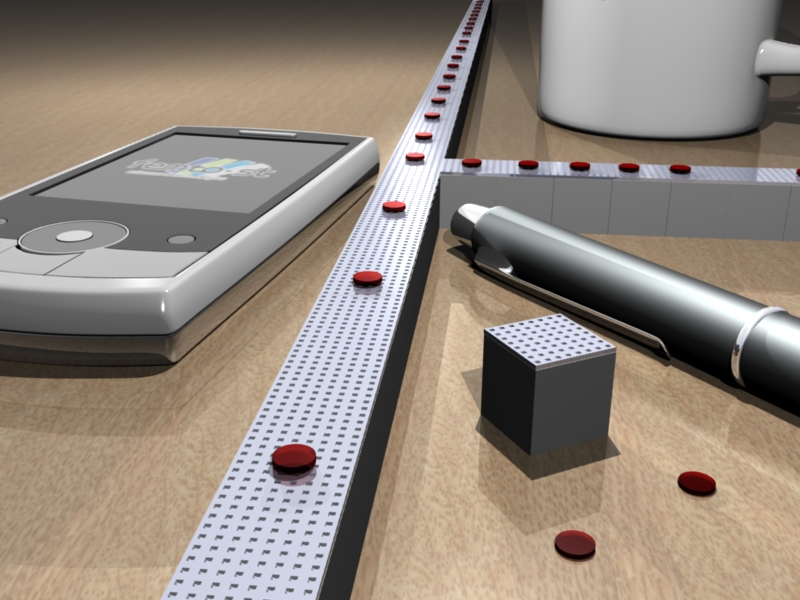
V. Guelpa, G. J. Laurent, B. Dahroug, and N. Le Fort-Piat, “Modular Contact-Free Conveyors for Handling Planar Fragile Objects,” IEEE Transactions on Robotics, vol. 33, no. 1, pp. 92–101, 2016.
@article{Guelpa2016modular,
author = {Guelpa, Valérian and Laurent, Guillaume J. and Dahroug, Bassem and Le Fort-Piat, Nadine},
title = {Modular Contact-Free Conveyors for Handling Planar Fragile Objects},
doi = {10.1109/TRO.2016.2623340},
number = {1},
pages = {92--101},
volume = {33},
groups = {ACLI, Distributed Manipulation with Air Flow},
journal = {IEEE Transactions on Robotics},
year = {2016}
}
B. Dahroug, G. J. Laurent, V. Guelpa, and N. Le Fort-Piat, “Design, modeling and control of a modular contactless wafer handling system,” in Proc. of the IEEE Int. Conf. on Robotics and Automation, 2015, pp. 976–981.
@inproceedings{Dahroug2015design,
author = {Dahroug, Bassem and Laurent, Guillaume J. and Guelpa, Valérian and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE Int. Conf. on Robotics and Automation},
title = {Design, modeling and control of a modular contactless wafer handling system},
doi = {10.1109/ICRA.2015.7139295},
note = {Best Automation Paper Award},
pages = {976--981},
groups = {ACTI, Distributed Manipulation with Air Flow},
year = {2015}
}
G. J. Laurent and H. Moon, “A survey of non-prehensile pneumatic manipulation surfaces: principles, models and control,” Intelligent Service Robotics, vol. 8, no. 3, pp. 151–163, 2015.
@article{Laurent2015survey,
author = {Laurent, Guillaume J. and Moon, Hyungpil},
title = {A survey of non-prehensile pneumatic manipulation surfaces: principles, models and control},
doi = {10.1007/s11370-015-0175-0},
number = {3},
pages = {151--163},
volume = {8},
groups = {ACLI, Distributed Manipulation with Air Flow},
journal = {Intelligent Service Robotics},
year = {2015}
}
G. J. Laurent, A. Delettre, R. Zeggari, R. Yahiaoui, J.-F. Manceau, and N. Le Fort-Piat, “Micropositioning and Fast Transport Using a Contactless Micro-Conveyor,” Micromachines, vol. 5, no. 1, pp. 66–80, 2014.
@article{Laurent2014micropositionning,
author = {Laurent, Guillaume J. and Delettre, Anne and Zeggari, Rabah and Yahiaoui, Reda and Manceau, Jean-François and Le Fort-Piat, Nadine},
title = {Micropositioning and Fast Transport Using a Contactless Micro-Conveyor},
doi = {10.3390/mi5010066},
issn = {2072-666X},
number = {1},
pages = {66--80},
volume = {5},
groups = {ACLI, Distributed Manipulation with Air Flow},
journal = {Micromachines},
year = {2014}
}
J. Agnus et al., “Robotic microassembly and micromanipulation at FEMTO-ST,” Journal of Micro-Bio Robotics, vol. 8, pp. 91–106, 2013.
@article{Agnus2013robotic,
author = {Agnus, J. and Chaillet, N. and Clévy, C. and Dembélé, S. and Gauthier, M. and Haddab, Y. and Laurent, G. and Lutz, P. and Piat, N. and Rabenorosoa, K. and Rakotondrabe, M. and Tamadazte, B.},
title = {Robotic microassembly and micromanipulation at {FEMTO-ST}},
doi = {10.1007/s12213-013-0065-5},
pages = {91--106},
volume = {8},
groups = {ACLI, Distributed Manipulation with Air Flow},
journal = {Journal of Micro-Bio Robotics},
year = {2013}
}
A. Delettre, G. J. Laurent, N. Le Fort-Piat, and C. Varnier, “3-DoF potential air flow manipulation by inverse modeling control,” in Proc. of the IEEE Int. Conf. on Automation Science and Engineering, 2012, pp. 926–931.
@inproceedings{Delettre2012three,
author = {Delettre, Anne and Laurent, Guillaume J. and Le Fort-Piat, Nadine and Varnier, Christophe},
booktitle = {Proc. of the IEEE Int. Conf. on Automation Science and Engineering},
title = {{3-DoF} potential air flow manipulation by inverse modeling control},
doi = {10.1109/CoASE.2012.6386380},
pages = {926--931},
groups = {ACTI, Distributed Manipulation with Air Flow},
year = {2012}
}
A. Delettre, G. J. Laurent, Y. Haddab, and N. Le Fort-Piat, “Robust control of a planar manipulator for flexible and contactless handling,” IFAC Mechatronics, vol. 22, no. 6, pp. 852–861, 2012.
@article{Delettre2012robust,
author = {Delettre, Anne and Laurent, Guillaume J. and Haddab, Yassine and Le Fort-Piat, Nadine},
title = {Robust control of a planar manipulator for flexible and contactless handling},
doi = {10.1016/j.mechatronics.2012.05.003},
number = {6},
pages = {852--861},
volume = {22},
groups = {ACLI, Distributed Manipulation with Air Flow},
journal = {IFAC Mechatronics},
year = {2012}
}
A. Delettre, G. J. Laurent, and N. Le Fort-Piat, “2-DoF Contactless Distributed Manipulation Using Superposition of Induced Air Flows,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2011, pp. 5121–5126.
@inproceedings{Delettre2011two,
author = {Delettre, Anne and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {{2-DoF} Contactless Distributed Manipulation Using Superposition of Induced Air Flows},
doi = {10.1109/IROS.2011.6094586},
pages = {5121--5126},
groups = {ACTI, Distributed Manipulation with Air Flow},
year = {2011}
}
G. J. Laurent, A. Delettre, and N. Le Fort-Piat, “A new aerodynamic traction principle for handling products on an air cushion,” IEEE Transactions on Robotics, vol. 27, no. 2, pp. 379–384, 2011.
@article{Laurent2011new,
author = {Laurent, Guillaume J. and Delettre, Anne and Le Fort-Piat, Nadine},
title = {A new aerodynamic traction principle for handling products on an air cushion},
doi = {10.1109/TRO.2011.2109211},
number = {2},
pages = {379--384},
volume = {27},
groups = {ACLI, Distributed Manipulation with Air Flow},
journal = {IEEE Transactions on Robotics},
year = {2011}
}
K. Boutoustous, G. J. Laurent, E. Dedu, L. Matignon, J. Bourgeois, and N. Le Fort-Piat, “Distributed control architecture for smart surfaces,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2010, pp. 2018–2024.
@inproceedings{Boutoustous2010distributed,
author = {Boutoustous, Kahina and Laurent, Guillaume J. and Dedu, Eugen and Matignon, Laëtitia and Bourgeois, Julien and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Distributed control architecture for smart surfaces},
doi = {10.1109/IROS.2010.5650668},
pages = {2018--2024},
groups = {ACTI, Distributed Manipulation with Air Flow},
year = {2010}
}
A. Delettre, G. J. Laurent, and N. Le Fort-Piat, “A new contactless conveyor system for handling clean and delicate products using induced air flows,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2010, pp. 2351–2356.
@inproceedings{Delettre2010new,
author = {Delettre, Anne and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {A new contactless conveyor system for handling clean and delicate products using induced air flows},
doi = {10.1109/IROS.2010.5652194},
pages = {2351--2356},
groups = {ACTI, Distributed Manipulation with Air Flow},
year = {2010}
}
L. Matignon, G. J. Laurent, N. Le Fort-Piat, and Y.-A. Chapuis, “Designing decentralized controllers for distributed-air-jet MEMS-based micromanipulators by reinforcement learning,” Journal of Intelligent and Robotic Systems, vol. 59, no. 2, pp. 145–166, 2010.
@article{Matignon2010designing,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine and Chapuis, Yves-André},
title = {Designing decentralized controllers for distributed-air-jet {MEMS}-based micromanipulators by reinforcement learning},
doi = {10.1007/s10846-010-9396-9},
number = {2},
pages = {145--166},
volume = {59},
groups = {ACLI, Distributed Manipulation with Air Flow, Decentralized Reinforcement Learning},
journal = {Journal of Intelligent and Robotic Systems},
year = {2010}
}
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “Design of semi-decentralized control laws for distributed-air-jet micromanipulators by reinforcement learning,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2009, pp. 3277–3283.
@inproceedings{Matignon2009design,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Design of semi-decentralized control laws for distributed-air-jet micromanipulators by reinforcement learning},
doi = {10.1109/IROS.2009.5353902},
pages = {3277--3283},
groups = {ACTI, Distributed Manipulation with Air Flow, Decentralized Reinforcement Learning},
year = {2009}
}
Decentralized Reinforcement Learning
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “Independent Reinforcement Learners In Cooperative Markov Games: A Survey Regarding Coordination Problems,” The Knowledge Engineering Review, vol. 27, pp. 1–31, 2012.
@article{Matignon2012independent,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
title = {Independent Reinforcement Learners In Cooperative Markov Games: A Survey Regarding Coordination Problems},
doi = {10.1017/S0269888912000057},
pages = {1--31},
volume = {27},
groups = {ACLI, Decentralized Reinforcement Learning},
journal = {The Knowledge Engineering Review},
year = {2012}
}
G. J. Laurent, L. Matignon, and N. Le Fort-Piat, “The World of Independent Learners is not Markovian,” Innovation in Knowledge-Based & Intelligent Engineering Systems, vol. 15, no. 1, pp. 55–64, 2011.
@article{Laurent2011world,
author = {Laurent, Guillaume J. and Matignon, Laëtitia and Le Fort-Piat, Nadine},
title = {The World of Independent Learners is not Markovian},
doi = {10.3233/KES-2010-0206},
number = {1},
pages = {55--64},
volume = {15},
groups = {ACLI, Decentralized Reinforcement Learning},
journal = {Innovation in Knowledge-Based \& Intelligent Engineering Systems},
year = {2011}
}
L. Matignon, G. J. Laurent, N. Le Fort-Piat, and Y.-A. Chapuis, “Designing decentralized controllers for distributed-air-jet MEMS-based micromanipulators by reinforcement learning,” Journal of Intelligent and Robotic Systems, vol. 59, no. 2, pp. 145–166, 2010.
@article{Matignon2010designing,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine and Chapuis, Yves-André},
title = {Designing decentralized controllers for distributed-air-jet {MEMS}-based micromanipulators by reinforcement learning},
doi = {10.1007/s10846-010-9396-9},
number = {2},
pages = {145--166},
volume = {59},
groups = {ACLI, Distributed Manipulation with Air Flow, Decentralized Reinforcement Learning},
journal = {Journal of Intelligent and Robotic Systems},
year = {2010}
}
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “Design of semi-decentralized control laws for distributed-air-jet micromanipulators by reinforcement learning,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2009, pp. 3277–3283.
@inproceedings{Matignon2009design,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Design of semi-decentralized control laws for distributed-air-jet micromanipulators by reinforcement learning},
doi = {10.1109/IROS.2009.5353902},
pages = {3277--3283},
groups = {ACTI, Distributed Manipulation with Air Flow, Decentralized Reinforcement Learning},
year = {2009}
}
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “Hysteretic Q-Learning : an algorithm for Decentralized Reinforcement Learning in Cooperative Multi-Agent Teams,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, San Diego, CA, USA, 2007, pp. 64–69.
@inproceedings{Matignon2007hysteretic,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Hysteretic {Q}-Learning : an algorithm for Decentralized Reinforcement Learning in Cooperative Multi-Agent Teams},
doi = {10.1109/IROS.2007.4399095},
pages = {64--69},
address = {San Diego, CA, USA},
groups = {ACTI, Decentralized Reinforcement Learning},
month = oct,
year = {2007}
}
On-Line learning
G. Laurent, “On-Line Learning for Micro-Object Manipulation,” in Markov Decision Processes in Artificial Intelligence, O. Sigaud and O. Buffet, Eds. Wiley-ISTE, 2010.
@incollection{Laurent2010online,
author = {Laurent, Guillaume},
booktitle = {Markov Decision Processes in Artificial Intelligence},
title = {On-Line Learning for Micro-Object Manipulation},
editor = {Sigaud, Olivier and Buffet, Olivier},
isbn = {978-1-848-21167-4},
publisher = {Wiley-ISTE},
groups = {COS, On-Line Learning},
year = {2010}
}
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “Improving Reinforcement Learning Speed for Robot Control,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Beijing, China, 2006, pp. 3172–3177.
@inproceedings{Matignon2006improving,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Improving Reinforcement Learning Speed for Robot Control},
doi = {10.1109/IROS.2006.282341},
pages = {3172--3177},
address = {Beijing, China},
groups = {ACTI, On-Line Learning},
month = oct,
year = {2006}
}
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “Reward Function and Initial Values: Better Choices for Accelerated Goal-Directed Reinforcement Learning,” in Proc. of the Int. Conf. on Artificial Neural Networks, 2006, vol. 4131, pp. 840–849.
@inproceedings{Matignon2006reward,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Proc. of the Int. Conf. on Artificial Neural Networks},
title = {Reward Function and Initial Values: Better Choices for Accelerated Goal-Directed Reinforcement Learning},
doi = {10.1007/11840817_87},
editor = {Kollias, S.D. and Stafylopatis, A. and Duch, W. and Oja, E.},
pages = {840--849},
publisher = {Springer-Verlag},
series = {Lecture Notes in Computer Science},
volume = {4131},
groups = {ACTI, On-Line Learning},
year = {2006}
}
C. Adda, G. J. Laurent, and N. Le Fort-Piat, “Learning to control a real micropositioning system in the STM-Q framework,” in Proc. of the IEEE Int. Conf. on Robotics and Automation, Barcelone, Spain, 2005, pp. 4580–4585.
@inproceedings{Adda2005learning,
author = {Adda, Cédric and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Proc. of the IEEE Int. Conf. on Robotics and Automation},
title = {Learning to control a real micropositioning system in the {STM-Q} framework},
doi = {10.1109/ROBOT.2005.1570824},
pages = {4580--4585},
address = {Barcelone, Spain},
groups = {ACTI, On-Line Learning},
month = apr,
year = {2005}
}
G. J. Laurent and E. Piat, “Learning Mixed Behaviours with Parallel Q-learning,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Lausanne, Switzerland, 2002, vol. 1, pp. 1002–1007.
@inproceedings{Laurent2002learning,
author = {Laurent, Guillaume J. and Piat, Emmanuel},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Learning Mixed Behaviours with Parallel {Q}-learning},
doi = {10.1109/IRDS.2002.1041521},
pages = {1002--1007},
volume = {1},
address = {Lausanne, Switzerland},
groups = {ACTI, On-Line Learning},
month = sep,
year = {2002}
}
G. Laurent and E. Piat, “Parallel Q-Learning for a block-pushing problem,” in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Maui, USA, 2001, vol. 1, pp. 286–291.
@inproceedings{Laurent2001parallel,
author = {Laurent, Guillaume and Piat, Emmanuel},
booktitle = {Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems},
title = {Parallel {Q}-Learning for a block-pushing problem},
doi = {10.1109/IROS.2001.973372},
pages = {286--291},
volume = {1},
address = {Maui, USA},
groups = {ACTI, On-Line Learning},
month = oct,
year = {2001}
}
Publications in French
F. Amiot et al., “Détermination des propriétés mécaniques transverses de fibres par compression diamétrale et mesures de champs de déplacement,” in 24ème Congrès Français de Mécanique, Brest, France, 2019, p. 3.
@inproceedings{Amiot2019determination,
author = {Amiot, Fabien and Blot, Mélissa and Weemaes, Tine and Bernollin, Hugo and Laurent, Guillaume and Clévy, Cédric and Placet, Vincent},
booktitle = {24ème Congrès Français de Mécanique},
title = {Détermination des propriétés mécaniques transverses de fibres par compression diamétrale et mesures de champs de déplacement},
pages = {3},
language = {fr},
address = {Brest, France},
groups = {ACTN},
year = {2019}
}
G. Laurent, “Mise en pratique de LSPI pour la commande linéaire quadratique adaptative d’une surface de manipulation à coussin d’air actif,” in Journées Francophones sur la Planification, la Décision et l’Apprentissage pour la conduite de systèmes, Besançon, 2010.
@inproceedings{Laurent2010mise,
author = {Laurent, Guillaume},
booktitle = {Journées Francophones sur la Planification, la Décision et l'Apprentissage pour la conduite de systèmes},
title = {Mise en pratique de {LSPI} pour la commande linéaire quadratique adaptative d'une surface de manipulation à coussin d'air actif},
language = {fr},
address = {Besançon},
groups = {ACTN},
year = {2010}
}
Y. Haddab, B. Lang, and G. Laurent, “Matlab/Simulink pour l’analyse et la commande de systèmes,” Techniques de l’ingénieur, vol. TIB394DUO, no. s7460, pp. 1–16, 2010.
@article{Haddab2010matlab,
author = {Haddab, Yassine and Lang, Bernard and Laurent, Guillaume},
title = {Matlab/Simulink pour l'analyse et la commande de systèmes},
language = {fr},
number = {s7460},
pages = {1--16},
url = {https://www.techniques-ingenieur.fr/base-documentaire/automatique-robotique-th16/regulation-et-commande-des-systemes-asservis-42394210/matlab-simulink-pour-l-analyse-et-la-commande-de-systemes-s7460/},
volume = {TIB394DUO},
groups = {ACLN},
journal = {Techniques de l'ingénieur},
year = {2010}
}
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “SOaN: un algorithme pour la coordination d’agents apprenants et non communicants,” in Journées Francophones sur la Planification, la Décision et l’Apprentissage pour la conduite de systèmes, Paris, 2009, pp. 115–121.
@inproceedings{Matignon2009soan,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Journées Francophones sur la Planification, la Décision et l'Apprentissage pour la conduite de systèmes},
title = {{SOaN}: un algorithme pour la coordination d'agents apprenants et non communicants},
language = {fr},
pages = {115--121},
address = {Paris},
groups = {ACTN},
month = {2-3 juin},
year = {2009}
}
G. Laurent, “Apprentissage en ligne de la manipulation de micro-objets,” in Processus décisionnels de Markov en intelligence artificielle : volume 1, principes généraux et applications, O. Buffet and O. Sigaud, Eds. Hermès Science Publications, 2008, pp. 221–232.
@incollection{Laurent2008apprentissage,
author = {Laurent, Guillaume},
booktitle = {Processus décisionnels de Markov en intelligence artificielle~: volume 1, principes généraux et applications},
title = {Apprentissage en ligne de la manipulation de micro-objets},
editor = {Buffet, Olivier and Sigaud, Olivier},
isbn = {978-2746220577},
language = {fr},
pages = {221--232},
publisher = {Hermès Science Publications},
series = {Traité IC2, Informatique et systèmes d'information},
groups = {COS},
year = {2008}
}
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “Un algorithme décentralisé d’apprentissage par renforcement multi-agents coopératifs : le Q-Learning Hystérétique,” in Journées Francophones sur la Planification, la Décision et l’Apprentissage pour la conduite de systèmes, Grenoble, 2007, pp. 115–121.
@inproceedings{Matignon2007algorithme,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Journées Francophones sur la Planification, la Décision et l'Apprentissage pour la conduite de systèmes},
title = {Un algorithme décentralisé d'apprentissage par renforcement multi-agents coopératifs : le Q-Learning Hystérétique},
language = {fr},
pages = {115--121},
address = {Grenoble},
groups = {ACTN},
month = {Juillet},
year = {2007}
}
G. J. Laurent and E. Piat, “Apprentissage par renforcement dans le cadre des processus décisionnels de Markov factorisés observables dans le désordre,” Revue d’Intelligence Artificielle, vol. 20, pp. 275–309, 2006.
@article{Laurent2006apprentissage,
author = {Laurent, Guillaume J. and Piat, Emmanuel},
title = {Apprentissage par renforcement dans le cadre des processus décisionnels de Markov factorisés observables dans le désordre},
doi = {10.3166/ria.20.275-310},
language = {fr},
pages = {275--309},
volume = {20},
groups = {ACLN, Decentralized Reinforcement Learning},
journal = {Revue d'Intelligence Artificielle},
year = {2006}
}
L. Matignon, G. J. Laurent, and N. Le Fort-Piat, “Choix de la fonction de renforcement et des valeurs initiales pour accélérer les problèmes d’apprentissage par renforcement de plus court chemin stochastique,” in Journées Francophones sur la Planification, la Décision et l’Apprentissage pour la conduite de systèmes, Toulouse, 2006, pp. 107–114.
@inproceedings{Matignon2006choix,
author = {Matignon, Laëtitia and Laurent, Guillaume J. and Le Fort-Piat, Nadine},
booktitle = {Journées Francophones sur la Planification, la Décision et l'Apprentissage pour la conduite de systèmes},
title = {Choix de la fonction de renforcement et des valeurs initiales pour accélérer les problèmes d'apprentissage par renforcement de plus court chemin stochastique},
language = {fr},
pages = {107--114},
address = {Toulouse},
groups = {ACTN},
month = {10-12 mai},
year = {2006}
}
G. J. Laurent and E. Piat, “Conception et modélisation d’un microrobot nageur,” Journal Européen des Systèmes Automatisés, vol. 37, no. 1, pp. 31–48, 2003.
@article{Laurent2003conception,
author = {Laurent, Guillaume J. and Piat, Emmanuel},
title = {Conception et modélisation d'un microrobot nageur},
doi = {10.3166/jesa.37.31-48},
language = {fr},
number = {1},
pages = {31--48},
volume = {37},
groups = {ACLN, Untethered Microrobots},
journal = {Journal Européen des Systèmes Automatisés},
year = {2003}
}
G. J. Laurent and E. Piat, “Dyna-Q Parallèle,” in Journées Nationales sur les Processus Décisionnels de Markov et l’Intelligence Artificielle, Caen, 2003.
@inproceedings{Laurent2003dyna-q,
author = {Laurent, Guillaume J. and Piat, Emmanuel},
booktitle = {Journées Nationales sur les Processus Décisionnels de Markov et l'Intelligence Artificielle},
title = {Dyna-{Q} Parallèle},
language = {fr},
address = {Caen},
groups = {ACTN},
month = {2 Juin},
year = {2003}
}
G. Laurent and E. Piat, “Commande de micromanipulateurs plans par apprentissage par renforcement,” in 14èmes Journées des Jeunes Chercheurs en Robotique, Evry, 2001, pp. 20–25.
@inproceedings{Laurent2001commande,
author = {Laurent, Guillaume and Piat, Emmanuel},
booktitle = {14èmes Journées des Jeunes Chercheurs en Robotique},
title = {Commande de micromanipulateurs plans par apprentissage par renforcement},
language = {fr},
pages = {20--25},
address = {Evry},
groups = {ACTN},
month = {31 Mai -- 1er Juin},
year = {2001}
}
PhD Manuscripts (in French)
M. Diezinger, “Estimation de forces par vision dans les robots continus,” PhD thesis, Université de Bourgogne Franche-Comté, 2023.
@phdthesis{Diezinger2023phd,
author = {Diezinger, Matyas},
date = {2023-12-21},
institution = {Université de Bourgogne Franche-Comté},
title = {Estimation de forces par vision dans les robots continus},
groups = {TH},
year = {2023}
}
C. Nwafor, “Contribution to the Miniaturization of Continuum Robots by Using Glass,” PhD thesis, Université Bourgogne Franche-Comté, 2023.
@phdthesis{Nwafor2023phd,
author = {Nwafor, Chibundo},
date = {2023-11-15},
institution = {Université Bourgogne Franche-Comté},
title = {Contribution to the Miniaturization of Continuum Robots by Using Glass},
groups = {TH},
year = {2023}
}
M. Leveziel, “Conception, modélisation et commande de robots parallèles à articulations souples pour la micromanipulation à haute cadence,” PhD thesis, Université Bourgogne Franche-Comté, 2022.
@phdthesis{Leveziel2022phd,
author = {Leveziel, Maxence},
date = {2022-12-19},
institution = {Université Bourgogne Franche-Comté},
title = {Conception, modélisation et commande de robots parallèles à articulations souples pour la micromanipulation à haute cadence},
groups = {TH},
year = {2022}
}
A. N. André, “Mesure visuelle robuste à grands rapports plage sur résolution de la pose 3D de mires périodiques codées : applications à la microrobotique,” PhD thesis, Université Bourgogne Franche-Comté, 2021.
@phdthesis{Andre2021phd,
author = {André, Antoine N.},
date = {2021-09-08},
institution = {Université Bourgogne Franche-Comté},
title = {Mesure visuelle robuste à grands rapports plage sur résolution de la pose 3D de mires périodiques codées : applications à la microrobotique},
groups = {TH},
year = {2021}
}
B. Mauzé, “Triskèle-Bot : Étude et développement d’un robot parallèle continu pour le micro-positionnement,” PhD thesis, Université Bourgogne Franche-Comté, 2021.
@phdthesis{Mauze2021phd,
author = {Mauzé, Benjamin},
date = {2021-01-11},
institution = {Université Bourgogne Franche-Comté},
title = {Triskèle-Bot : Étude et développement d’un robot parallèle continu pour le micro-positionnement},
groups = {TH},
year = {2021}
}
W. Haouas, “Étude et développement de robots parallèles à plateformes configurables pour la micromanipulation dextre,” PhD thesis, Université Bourgogne Franche-Comté, 2018.
@phdthesis{Haouas2018phd,
author = {Haouas, Wissem},
date = {2018-11-14},
institution = {Université Bourgogne Franche-Comté},
title = {Étude et développement de robots parallèles à plateformes configurables pour la micromanipulation dextre},
groups = {TH},
year = {2018}
}
V. Guelpa, “Etalonnage et commande de microrobots par mesure visuelle sub-pixellique et multi- directionnelle,” PhD thesis, Université Bourgogne Franche-Comté, 2017.
@phdthesis{Guelpa2017phd,
author = {Guelpa, Valérian},
date = {2017-12-08},
institution = {Université Bourgogne Franche-Comté},
title = {Etalonnage et commande de microrobots par mesure visuelle sub-pixellique et multi- directionnelle},
groups = {TH},
year = {2017}
}
A. Delettre, “Conception, modélisation et commande d’une surface de manipulation sans contact à flux d’air induit,” PhD thesis, Université de Franche-Comté, 2011.
@phdthesis{Delettre2011phd,
author = {Delettre, Anne},
date = {2011-12-07},
institution = {Université de Franche-Comté},
title = {Conception, modélisation et commande d'une surface de manipulation sans contact à flux d'air induit},
groups = {TH},
year = {2011}
}
L. Matignon, “Synthèse d’agents adaptatifs et coopératifs par apprentissage par renforcement. Application à la commande d’un système distribué de micromanipulation,” PhD thesis, Université de Franche-Comté, Besançon, 2008.
@phdthesis{Matignon2008phd,
author = {Matignon, Laëtitia},
date = {2008-12-04},
institution = {Université de Franche-Comté},
title = {Synthèse d'agents adaptatifs et coopératifs par apprentissage par renforcement. Application à la commande d'un système distribué de micromanipulation},
address = {Besançon},
groups = {TH},
month = {4 décembre},
school = {Université de Franche-Comté},
year = {2008}
}
G. Laurent, “Synthèse de comportements par apprentissages par renforcement parallèles : application à la commande d’un micromanipulateur plan,” Thèse de doctorat, Université de Franche-Comté, Besançon, France, 2002.
@phdthesis{Laurent2002phd,
author = {Laurent, Guillaume},
date = {2002-12-18},
institution = {Université de Franche-Comté},
title = {Synthèse de comportements par apprentissages par renforcement parallèles~: application à la commande d'un micromanipulateur plan},
type = {Thèse de doctorat},
address = {Besançon, France},
groups = {TH},
school = {Université de Franche-Comté},
year = {2002}
}